グラフェン製ひずみセンサを用いたロボット用フレキシブル触覚センサデバイス
ヒトは五つの感覚機能(視覚、聴覚、触覚、味覚、嗅覚)を通じて外界情報を感知し、特に触覚は外界との物理的インターフェイスとして重要な役目を担っています。そこで本テーマではヒト型ロボット、例えば介護ロボットの高機能化を目指して、ヒトの皮膚のように薄くて柔らかくかつ外界との接触情報が検知可能なフレキシブル触覚センサデバイスを開発しています。具体的にはレーザ描画により、フレキシブル基板上(大きさ数mm)へのマイクログラフェン製ひずみセンサ(触覚センサ)の実現に挑戦しています。将来的には、これをロボットの指先などに実装することでさまざまな物体操作の高精度化が可能になります。
高機能化フレキシブルマイクロセンサシステム
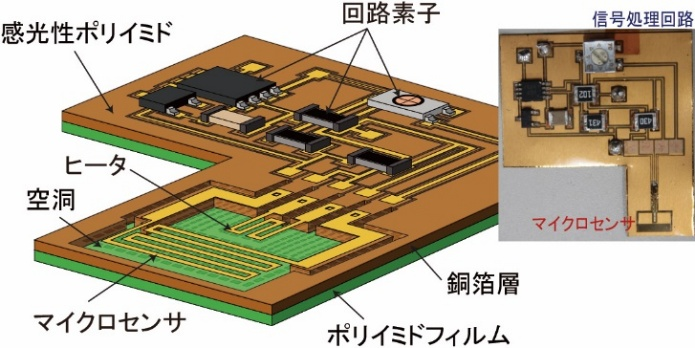 本テーマでは、フレキシブル基板上でのマイクロセンサと制御回路との集積化を目指します。具体的には、銅貼積層板(樹脂フィルム上に銅箔層が貼り付けられたフィルム)をMEMS基板とし、マイクロマシニング技術を用いることで本基板上にセンサ構造と配線構造とを形成し、同一基板上でのマイクロセンサと制御回路(ハイブリッド実装)の一体化を可能にします。また、フレキシブルな銅張積層板を折り紙のように折り曲げることで、マイクロセンサ・制御回路の立体化を実現可能にします。これにより、至る所へのセンサの取り付けを可能にし、身の回りのさまざまな環境情報の取得を可能にします。
本テーマでは、フレキシブル基板上でのマイクロセンサと制御回路との集積化を目指します。具体的には、銅貼積層板(樹脂フィルム上に銅箔層が貼り付けられたフィルム)をMEMS基板とし、マイクロマシニング技術を用いることで本基板上にセンサ構造と配線構造とを形成し、同一基板上でのマイクロセンサと制御回路(ハイブリッド実装)の一体化を可能にします。また、フレキシブルな銅張積層板を折り紙のように折り曲げることで、マイクロセンサ・制御回路の立体化を実現可能にします。これにより、至る所へのセンサの取り付けを可能にし、身の回りのさまざまな環境情報の取得を可能にします。
環境にやさしいサステイナブルセンサデバイス
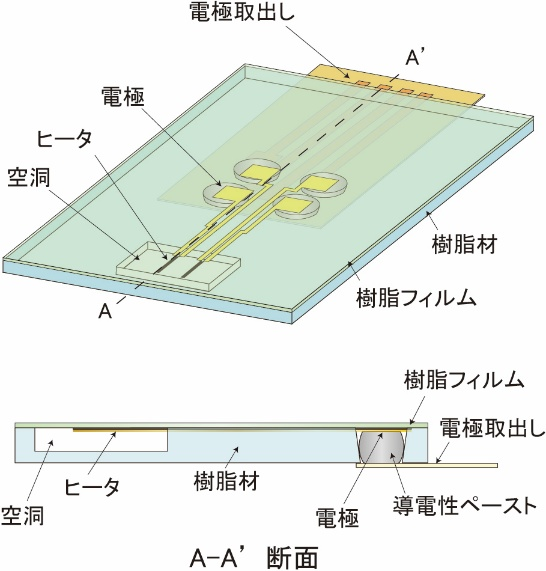
情報化社会の発展に伴いマイクロセンサの普及は急激に増加し、社会の至る所にセンサが取り付けられたトリリオンセンサ時代と言われるようになっています。実際に携帯電話、ワイヤレスイヤホン、パーソナルコンピュータなど身近な製品から家庭用ガスメータ及び自動車など幅広い分野で使われ、一方、使用後にはこれらは産業廃棄物として処理することになります。そこで本テーマでは、環境にやさしいサステイナブルセンサとして、使用後に環境中の水分子にて自己分解し自然に戻るセンサシステムの実現に挑戦しています。具体的には、サステイナブルセンサの第一歩として、センサ構成要素となる「基板、電極、センサ素子」全てを水分子で分解する材料からなる熱式サステイナブルセンサデバイスを提案開発しています。
流れの状態を可視化する壁面せん断応力センサデバイス
 地球上で移動する全ての物体には空気もしくは液体による抵抗力を受けます。例えば、水泳選手は水の抵抗を和らげることを目的として表面をサメ肌加工した水着を着用し、また自動車及び新幹線などは走行中の空気抵抗を減少させる流線形車体構造になっています。そこで本テーマでは、移動中の物体が流体から受ける抵抗力をリアルタイムで計測可能とする壁面せん断応力センサの実現を目指します。具体的には、なめらかな流線形の物体表面に取り付けられるようにフレキシブルな素材で、かつセンサ自体の大きさが流れを妨げない(厚さ数mm以下)、超薄型フレキシブルせん断応力センサを開発しています。
地球上で移動する全ての物体には空気もしくは液体による抵抗力を受けます。例えば、水泳選手は水の抵抗を和らげることを目的として表面をサメ肌加工した水着を着用し、また自動車及び新幹線などは走行中の空気抵抗を減少させる流線形車体構造になっています。そこで本テーマでは、移動中の物体が流体から受ける抵抗力をリアルタイムで計測可能とする壁面せん断応力センサの実現を目指します。具体的には、なめらかな流線形の物体表面に取り付けられるようにフレキシブルな素材で、かつセンサ自体の大きさが流れを妨げない(厚さ数mm以下)、超薄型フレキシブルせん断応力センサを開発しています。